Chapter 4: Architecture Design
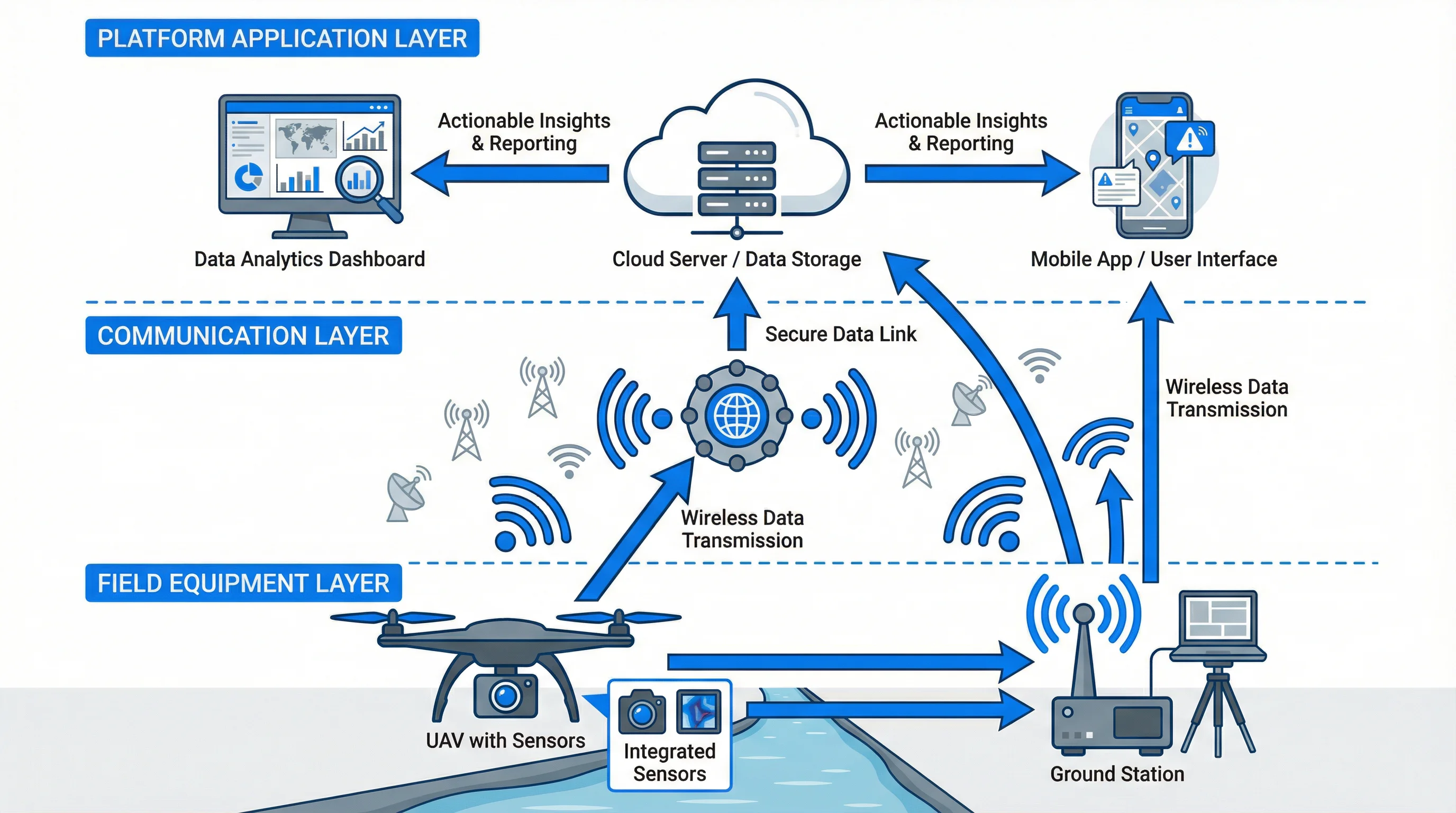
Figure 4.1: Three-Layer System Architecture - Field equipment, communication, and platform application layers with data flow
System Introduction and Positioning
The system architecture implements a distributed computing model that balances edge processing with cloud intelligence. The three-layer structure separates concerns while maintaining tight integration. The Field End layer handles data acquisition and immediate response, the Transmission Layer ensures reliable connectivity across diverse network conditions, and the Platform & Application Layer provides comprehensive analysis and management capabilities. This architecture supports scalability from single-UAV operations to coordinated multi-UAV fleets, accommodates various deployment models from fully cloud-based to hybrid edge-cloud configurations, and enables integration with existing environmental monitoring infrastructure.
Core Functional Indicators
Key performance indicators define system capabilities and guide design decisions. Flight performance includes maximum flight time of 30-90 minutes depending on configuration, operational radius of 5-50 kilometers, maximum wind resistance of level 5-6, and operating temperature range from -20°C to 50°C. Sensor performance encompasses visible light resolution of 4K-8K, thermal imaging resolution of 640×512 pixels, multispectral bands covering 400-1000nm, and gas detection sensitivity at ppm levels. Data transmission achieves real-time video streaming at 1080p-4K resolution, telemetry update rate of 10Hz, and end-to-end latency under 500ms. Positioning accuracy reaches 2-5cm horizontally with RTK correction. The platform supports concurrent management of up to 50 UAVs, processes 10TB of daily data, and maintains 99.5% system availability.
Equipment Connection Diagram
Physical and logical connections form a comprehensive network topology. UAVs connect to ground stations via dual-redundant radio links operating at 2.4GHz and 5.8GHz frequencies. Ground stations communicate with cloud platforms through 4G/5G cellular networks with automatic failover to satellite links when terrestrial connectivity is unavailable. RTK base stations transmit differential corrections to UAVs via dedicated radio channels, enabling centimeter-level positioning accuracy. Sensors interface with onboard computers through high-speed serial connections, with data synchronized using precision time protocols. The cloud platform exposes RESTful APIs for integration with external systems including GIS platforms, environmental databases, and regulatory reporting portals. All connections implement encryption and authentication to ensure data security and system integrity.
Business Logic and Data Flow
The operational workflow orchestrates multiple subsystems to deliver end-to-end inspection capabilities. Mission planning begins with operators defining inspection areas, flight parameters, and sensor configurations through the web interface. The system automatically generates optimal flight paths considering airspace restrictions, weather conditions, and battery constraints. Upon mission execution, the UAV autonomously navigates to waypoints while sensors continuously capture data. Onboard AI performs real-time analysis to detect anomalies, triggering immediate alerts for critical findings. All sensor data streams to ground stations and cloud storage with redundant archiving. Post-flight processing applies advanced algorithms for comprehensive analysis including image stitching, thermal pattern recognition, and pollution source localization. Results populate interactive dashboards where operators review findings, annotate images, and generate reports. The system maintains complete audit trails documenting all activities for regulatory compliance and quality assurance.